El Desafío de la Navegación Autónoma
Imagina un robot que debe atravesar una ciudad concurrida, un bosque con terreno irregular, o el interior de un edificio en llamas. Para nosotros, humanos, navegar por estos entornos puede ser desafiante pero factible. Para un robot, representa uno de los problemas más complejos en robótica: la navegación autónoma.
La capacidad de moverse de forma independiente en entornos del mundo real, sin intervención humana constante, es una frontera crucial en la robótica moderna. Esta capacidad no solo determina dónde pueden operar los robots, sino fundamentalmente lo que pueden hacer y cómo pueden interactuar con nuestro mundo.
Percibiendo el Mundo: Los Sentidos Robóticos
Para navegar, primero hay que percibir. Los robots autónomos utilizan una variedad de sensores que funcionan como sus "sentidos", cada uno con fortalezas y limitaciones específicas:
Cámaras: La Visión Artificial
Las cámaras proporcionan datos visuales ricos que, cuando se procesan con algoritmos de visión por computadora avanzados, permiten a los robots identificar objetos, personas, señales y características del entorno. Los sistemas modernos utilizan múltiples cámaras para visión estéreo (similar a nuestra visión binocular) que añade percepción de profundidad.
LIDAR: Mapeo Preciso con Láser
Los sistemas LIDAR (Light Detection and Ranging) emiten pulsos láser que rebotan en los objetos circundantes y regresan al sensor, permitiendo crear mapas tridimensionales precisos del entorno. Esta tecnología, fundamental en vehículos autónomos, proporciona mediciones de distancia exactas incluso en condiciones de poca visibilidad.
Sensores Ultrasónicos y de Radar
Estos sensores emiten ondas sonoras o de radio que rebotan en objetos cercanos, proporcionando información sobre obstáculos próximos. Son especialmente útiles para detección de proximidad y evitación de colisiones a corta distancia.
IMU: El Sentido del Equilibrio
Las Unidades de Medición Inercial (IMU) combinan acelerómetros y giroscopios para proporcionar datos sobre la orientación, velocidad y fuerzas gravitacionales que actúan sobre el robot, similar a nuestro sistema vestibular que nos da sentido del equilibrio y movimiento.
GPS y Sistemas de Posicionamiento
En exteriores, los sistemas de navegación global por satélite proporcionan posicionamiento a escala mundial, aunque con precisión limitada. Para entornos interiores, donde el GPS no funciona bien, se utilizan tecnologías alternativas como balizas Bluetooth, Wi-Fi fingerprinting o sistemas de posicionamiento visual.

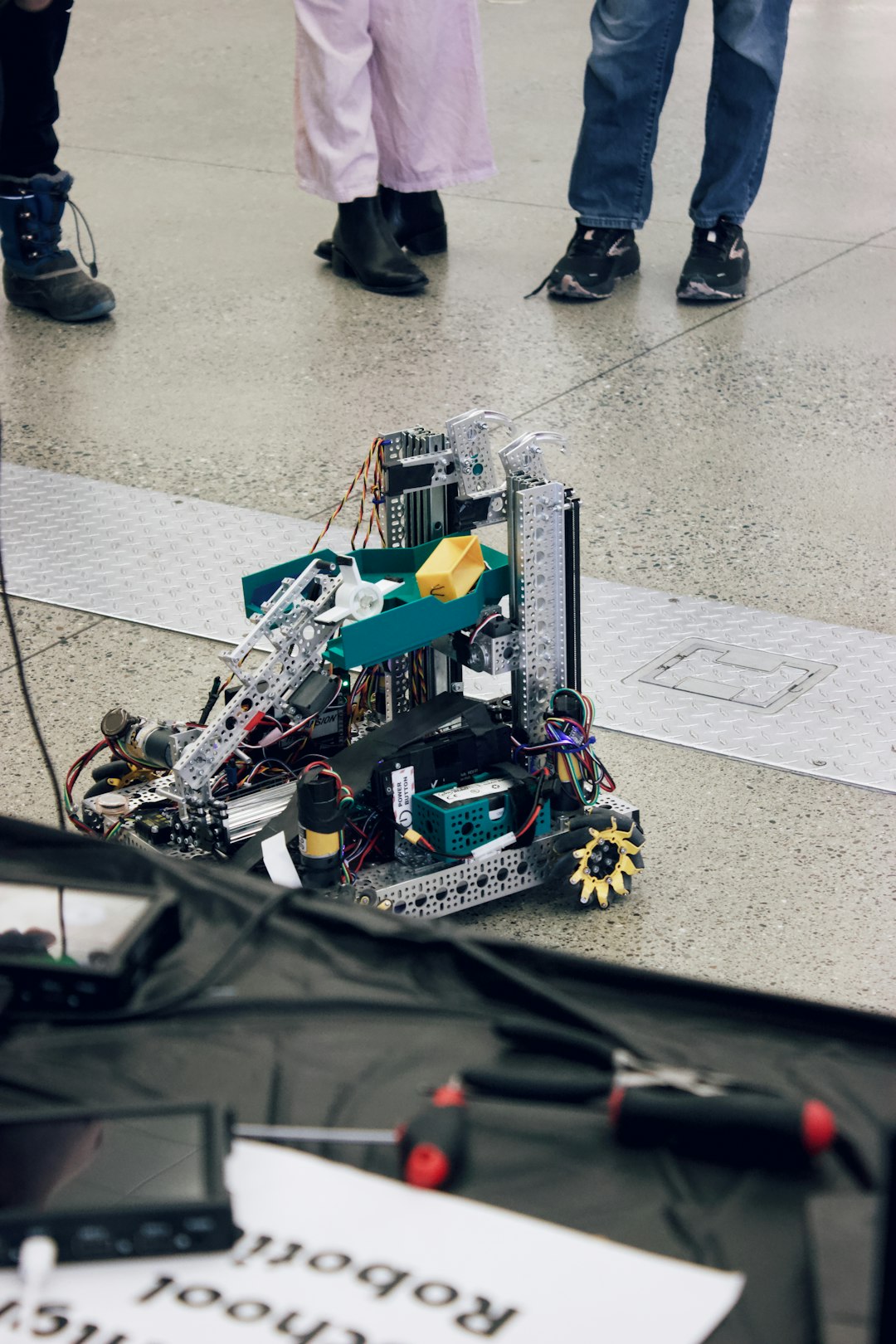
Conjunto de sensores de un robot autónomo avanzado, incluyendo LIDAR, cámaras estéreo y sensores ultrasónicos.
"La verdadera autonomía robótica no consiste solo en seguir instrucciones sin supervisión humana; se trata de entender el entorno, tomar decisiones informadas y adaptarse a situaciones imprevistas."
— Dr. Rodney Brooks, Pionero en Robótica
Construyendo Mapas Mentales: SLAM y Más Allá
Una vez que un robot puede percibir su entorno, necesita organizarse esos datos en una representación coherente del mundo: un mapa. Uno de los avances más significativos en robótica autónoma ha sido el desarrollo de técnicas de SLAM (Simultaneous Localization and Mapping).
El Problema del Huevo y la Gallina
SLAM aborda un desafío fundamental: para crear un mapa preciso, el robot necesita saber dónde está; pero para saber dónde está con precisión, necesita un mapa. Los algoritmos SLAM resuelven este problema circular mediante la actualización simultánea de la posición estimada del robot y el mapa del entorno.
Tipos de Representación
Los robots pueden representar el entorno de diferentes maneras:
- Mapas de ocupación de rejilla: Dividen el espacio en celdas, marcando cada una como ocupada, libre o desconocida.
- Mapas topológicos: Representan el entorno como un grafo de lugares importantes y conexiones entre ellos, similar a cómo recordamos rutas.
- Mapas basados en características: Identifican y rastrean elementos distintivos como esquinas, bordes o marcadores visuales.
- Nubes de puntos tridimensionales: Representaciones detalladas que capturan la geometría completa del entorno.
SLAM Semántico: Entendiendo el Significado
La nueva frontera es el SLAM semántico, donde los robots no solo mapean la geometría del entorno sino que también comprenden lo que ven: identifican objetos, categorizan espacios (cocina, dormitorio, calle, parque) y entienden relaciones espaciales ("la silla está junto a la mesa"). Esta comprensión de alto nivel facilita interacciones más naturales con humanos y toma de decisiones más sofisticada.
Planificación de Rutas: Encontrando el Camino
Con un mapa y conocimiento de su posición, el robot debe planificar cómo moverse de su ubicación actual a su destino, evitando obstáculos y optimizando criterios como distancia, tiempo o consumo de energía.
Algoritmos Clásicos
Algoritmos como A*, Dijkstra o RRT (Rapidly-exploring Random Trees) han sido pilares de la planificación de rutas robóticas. Estos métodos buscan caminos óptimos o casi óptimos a través del espacio representado en el mapa del robot.
Navegación Reactiva
Complementando la planificación global, los enfoques reactivos como los campos potenciales o el algoritmo Dynamic Window Approach permiten al robot responder rápidamente a obstáculos inesperados sin recalcular toda la ruta.
Planificación en Entornos Dinámicos
El verdadero desafío surge en entornos donde las cosas cambian constantemente: personas caminando, vehículos moviéndose, objetos que se desplazan. Los planificadores modernos predicen estos movimientos y ajustan las rutas en tiempo real, considerando no solo dónde están los obstáculos ahora, sino dónde estarán cuando el robot llegue a esa parte de su trayectoria.

Visualización de un algoritmo de planificación de ruta considerando múltiples obstáculos dinámicos en un entorno urbano.
Control y Ejecución: Movimiento Preciso
La planificación determina dónde debe ir el robot; el control se encarga de ejecutar ese plan traduciendo rutas abstractas en comandos precisos para motores y actuadores.
Sistemas de Control
Los controladores robóticos gestionan la compleja física del movimiento, compensando factores como la inercia, la fricción y las limitaciones mecánicas. Técnicas como el control PID, el control adaptativo o el control basado en modelos garantizan que el robot siga las trayectorias planificadas con precisión.
Locomoción Adaptativa
Los robots modernos pueden ajustar su forma de moverse según el terreno: reducir la velocidad en superficies resbaladizas, ajustar la altura al subir escaleras o modificar la configuración de las patas o ruedas para maximizar la tracción en terrenos irregulares.
Resiliencia ante Fallos
Los sistemas robustos implementan redundancia y capacidades de recuperación ante fallos, como continuar la misión con capacidades reducidas si un sensor o actuador falla.
Aplicaciones Transformadoras
Los avances en navegación autónoma están permitiendo aplicaciones revolucionarias en diversos campos:
Logística y Entrega
Robots de almacén como los utilizados por Amazon optimizan el almacenamiento y recuperación de productos, mientras que vehículos autónomos de última milla y drones de entrega prometen revolucionar la distribución de mercancías hasta el consumidor final.
Exploración y Operaciones en Entornos Extremos
Robots autónomos exploran las profundidades marinas, cuevas inexploradas, otros planetas e incluso el interior de reactores nucleares dañados. Estos robots operan en entornos donde los humanos no pueden llegar o donde el riesgo sería inaceptable.
Agricultura de Precisión
Tractores autónomos, drones de inspección y robots de cosecha navegan por campos agrícolas, monitorizan cultivos planta por planta y realizan operaciones con precisión milimétrica, reduciendo el uso de agroquímicos y optimizando la producción de alimentos.
Asistencia y Servicios
Robots de servicio autónomos realizan tareas de limpieza en hogares, oficinas y espacios públicos. Robots asistenciales navegan por entornos domésticos para ayudar a personas mayores o con discapacidades, proporcionando mayor independencia.
Respuesta a Emergencias
Robots de búsqueda y rescate navegan a través de edificios dañados por terremotos o incendios, localizando víctimas y evaluando riesgos antes de que los equipos humanos de rescate entren en zonas peligrosas.
Desafíos Actuales y Fronteras de Investigación
A pesar del progreso impresionante, la navegación autónoma enfrenta varios desafíos importantes:
Robustez en Condiciones Adversas
Condiciones climáticas extremas como niebla densa, lluvia intensa o nieve pueden degradar significativamente el rendimiento de los sensores. La investigación actual busca sistemas multimodales que combinen diferentes tipos de sensores para mantener la capacidad de navegación incluso cuando algunos sistemas están comprometidos.
Navegación Social
Moverse entre humanos requiere más que evitar colisiones; implica entender y seguir normas sociales implícitas: mantener distancias apropiadas, no interrumpir conversaciones, ceder el paso en situaciones adecuadas. Los robots están aprendiendo estas sutilezas a través de técnicas de aprendizaje por observación y refuerzo.
Adaptación a Entornos Desconocidos
Mientras que los robots actuales funcionan bien en entornos mapeados previamente, la verdadera autonomía implica la capacidad de adaptarse a lugares completamente nuevos sin intervención humana. Este desafío está impulsando investigaciones en transferencia de aprendizaje y generalización.
Eficiencia Energética
La navegación autónoma requiere un procesamiento intensivo que consume energía significativa, limitando la autonomía operativa de los robots móviles. Se están desarrollando arquitecturas de computación neuromórficas y algoritmos eficientes inspirados en cómo los animales navegan con recursos energéticos y computacionales limitados.
El Futuro de la Navegación Autónoma
Mirando hacia adelante, varias tendencias prometen seguir transformando este campo:
Sistemas Cognitivos Espaciales
La investigación en neurociencia sobre cómo los mamíferos representan y navegan el espacio (que valió el Premio Nobel de Medicina 2014) está inspirando nuevos enfoques biomimetizados. Las "células de lugar", "células de cuadrícula" y otros descubrimientos están informando arquitecturas robóticas que imitan cómo nuestros cerebros codifican el espacio.
Navegación Colectiva
Enjambres de robots que comparten información de navegación y mapas entre sí pueden explorar y mapear entornos mucho más rápido que unidades individuales. Estos sistemas distribuidos prometen mayor robustez y eficiencia en tareas como búsqueda y rescate o exploración planetaria.
Integración Perfecta con Infraestructuras
El futuro verá una integración más profunda entre robots autónomos y entornos inteligentes. Edificios, carreteras y espacios públicos equipados con sensores, balizas y sistemas de comunicación facilitarán la navegación robótica precisa incluso en entornos complejos.
Navegación Multimodal y Adaptativa
Los robots del futuro combinarán múltiples modos de locomoción: vehículos que pueden conducir y volar, robots que alternan entre ruedas y patas según el terreno, o sistemas que pueden navegar tanto en tierra como en agua. Esta versatilidad ampliará dramáticamente los entornos donde los robots pueden operar.
Conclusión: Un Mundo Navegable por Máquinas
La navegación autónoma representa un cambio paradigmático en la robótica. Estamos pasando de robots que operan en entornos controlados y predefinidos a máquinas que pueden moverse e interactuar con el mismo mundo complejo y dinámico que habitamos los humanos.
Esta capacidad es transformadora porque desbloquea todo el potencial de la robótica: un robot que puede navegar de forma segura y eficiente por nuestro mundo puede ayudar en innumerables tareas, desde lo mundano hasta lo extraordinario. Puede limpiar nuestros hogares, entregar medicinas, rescatar personas de edificios en llamas o explorar otros planetas.
A medida que estas tecnologías maduren, veremos una integración cada vez más fluida de robots autónomos en nuestra vida cotidiana. No se trata solo de máquinas que se mueven sin supervisión humana, sino de sistemas que entienden nuestros espacios, se adaptan a nuestras costumbres y contribuyen a nuestras sociedades de formas que apenas comenzamos a vislumbrar.

Comentarios (2)
Javier Ramírez
22 de mayo, 2024Artículo fascinante. Trabajo en logística y estamos implementando robots autónomos en nuestros almacenes. Es sorprendente lo rápido que la tecnología ha avanzado - hace cinco años, estos robots necesitaban marcadores en el suelo para navegar; ahora se mueven libremente y se adaptan a cambios en el layout del almacén sin reprogramación.
Diana Ortiz
21 de mayo, 2024Me interesa especialmente la sección sobre navegación social. ¿Existen ya robots que puedan navegar efectivamente en entornos muy concurridos como centros comerciales o estaciones de tren? ¿Qué algoritmos utilizan para predecir el movimiento humano, que puede ser bastante impredecible?
Deja tu comentario